
1.電気図面はややこしい
皆さんは電気回路の読解を非常にやっかいに感じたことはありませんか?筆者はあります。特に、電気について学び始めたころは、業務として読まなければならない電気回路図に四苦八苦した経験が脳にこびりついています。ですが電気回路計算同様、一定の約束事またはコツというものをつかめばある程度は電気図面が読めるようになります。
電気図面と一口に言っても、これにはいくつかの種類と一定の規則があります。ここでは種類についての詳しい説明は割愛しますが、おおまかに「系統図」「単線結線図」「複線図」「展開接続図」などがあります。これらの電気図面を読むために必要となってくるのはJIS規格などで定められたシンボル(記号)の理解と記憶です。図面に出てくるシンボルは人間用の言語でいうところの「単語」に相当します。ということは非常に数多くのシンボルが存在することは言うまでもありません。全てを理解し記憶するには非常に大きな労力が必要です。筆者も当然のことながら、そして恥ずかしながら全てを頭に叩き込んでいるわけではありません。ですが、接点やコイルなどのような頻出(もっといえば必出)のシンボルはきっちり抑えておく必要があります。
今回、この記事ではいくつかの種類のある電気図面のうち、主として制御回路に用いられる図面に特に焦点をあて、図面上の約束事や回路図の読み方について解説していきます。記事内に出てくる図面の種類は主回路としての複線図と制御回路としての展開接続図です。
1)電気図面における頻出シンボル
ここで、電気図面のうち複線図や展開接続図で非常に多く出てくるシンボルについて触れておきます。下に表でまとめています。表中に画像も載せていますが、あくまでイメージとなりますのでこの限りではないということも注意してください。
原則として新JIS記号で記載しています。実際は旧JIS記号で運用されているものもあるようです。またそれら以外にもJEMやIECなどの規格があり、各々違うシンボルを設定しているものもあります。しかし大枠では似たようなシンボルになります。異なるシンボルがある場合、ただ素直に読み変えればいいだけですので慌てず対応しましょう。






上記が電気図面でよく出てくるシンボルとなります。これら以外にもまだまだ多くの図記号がありますので覚えるのも大変ですが、まずはこれらの意味をしっかりおさえておきましょう。
2)電源と回路
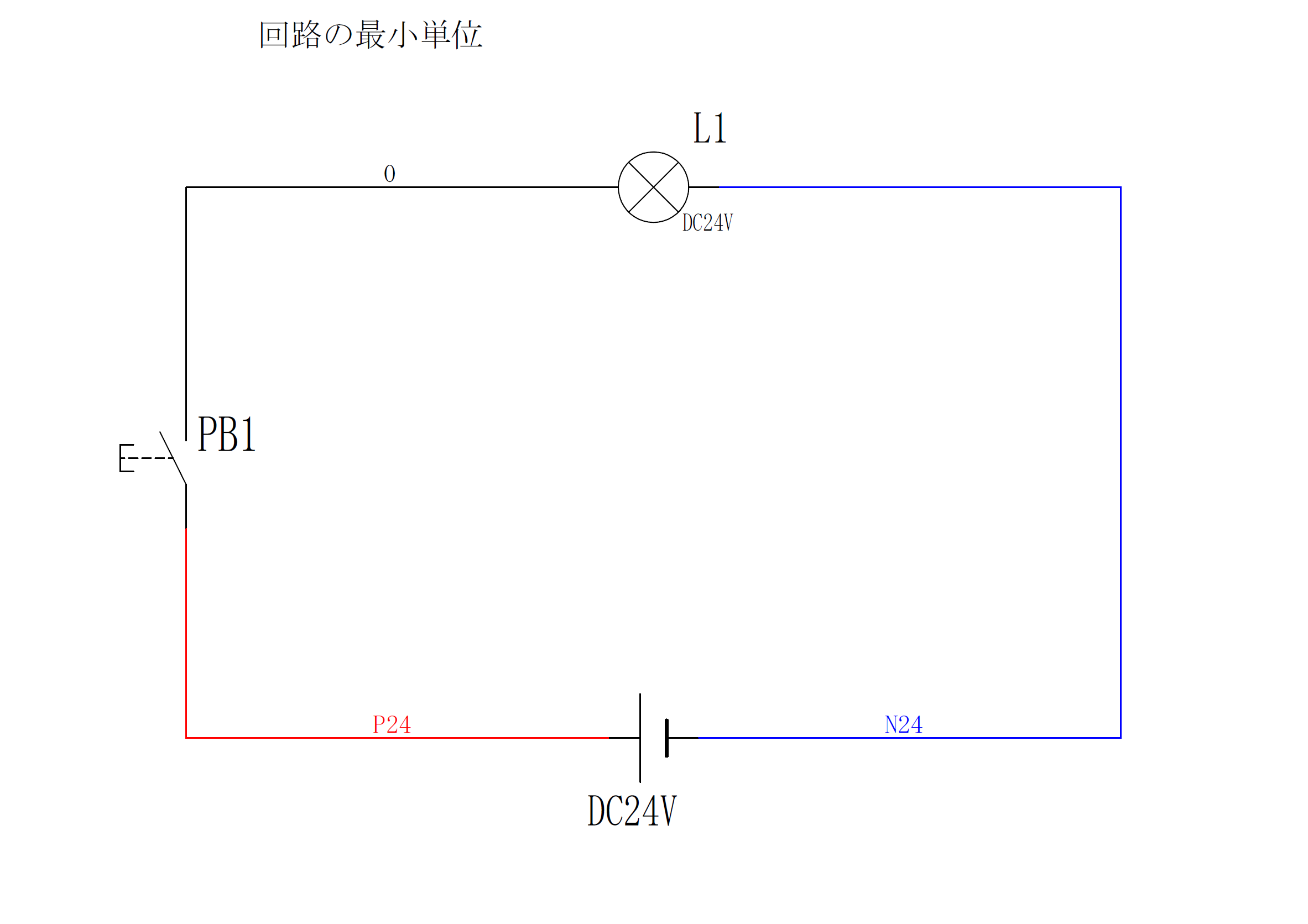
電気回路の最小単位ともいえるものが下図になります。電池から電源供給された状態でスイッチがONするとランプが点灯する回路となっています。正極(プラス側)から直接ひき出された配線を赤く、負極(マイナス側)から直接ひき出された配線を青く表示します。
電気回路図を読むときはこの最小単位が大切になります。電源の種別と定格、また負荷やスイッチの種類は例として挙げているのみとなりますのでここで取り上げる限りではありません。
以下は先の電気回路の最小単位をシーケンスラダーで記述したものです。例えばスタートを母線左側のP24とし、ゴールを母線右側のN24(0V)とします。正極(P24)と負極(N24)は同一の電源に存在するものですので、ここでも結局スイッチと負荷を介して回路はくるっと一周していることが表現されています。

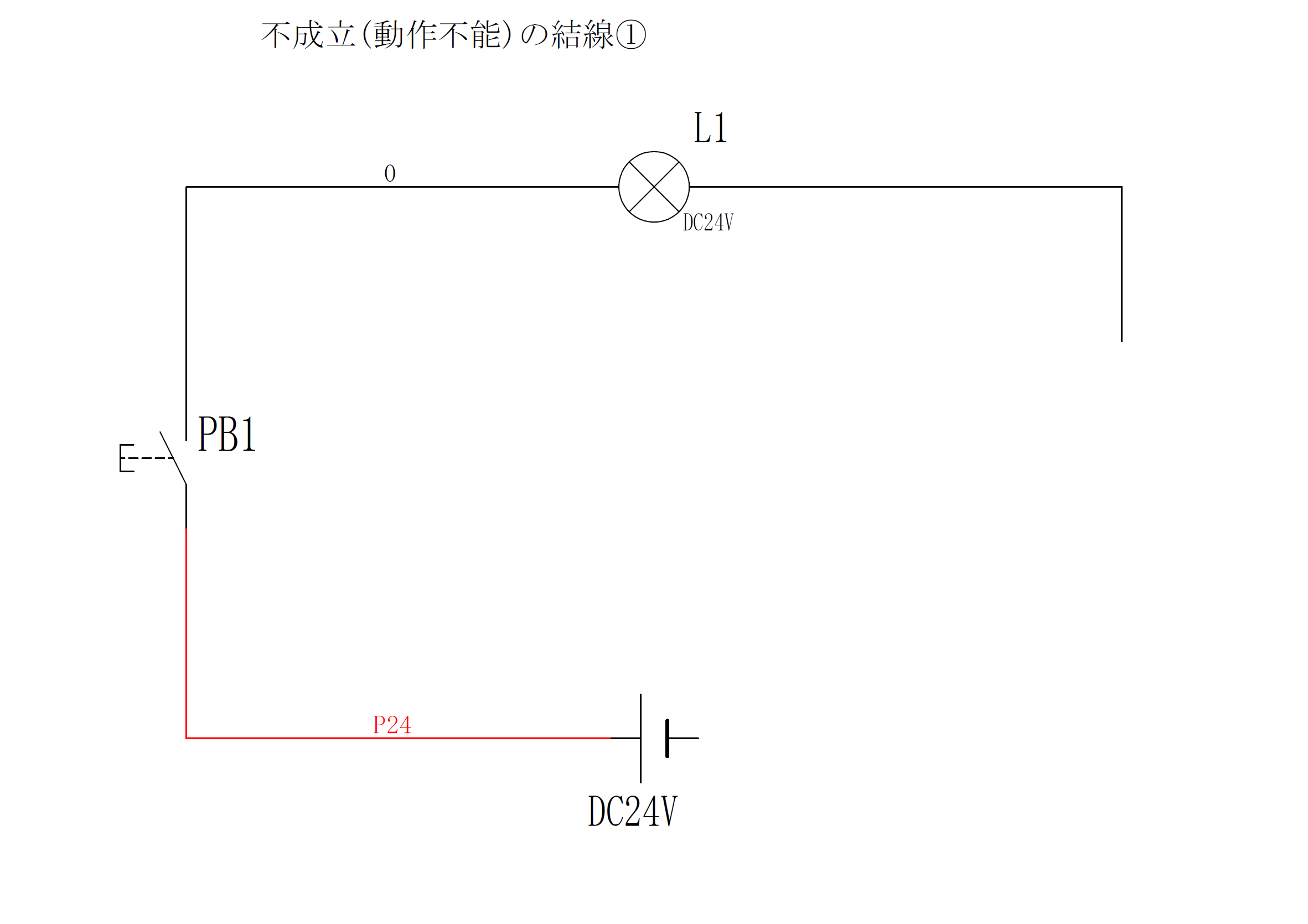
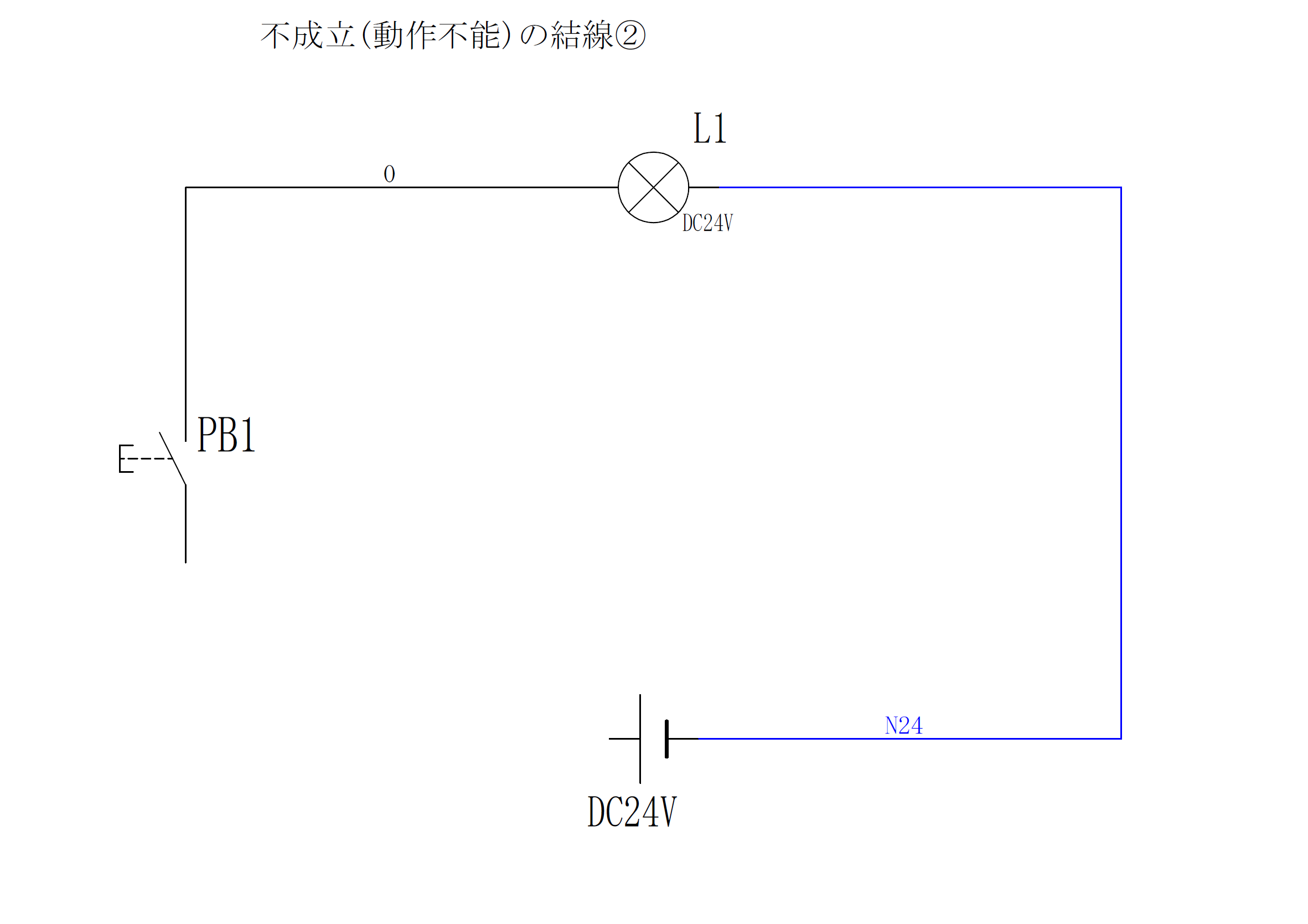
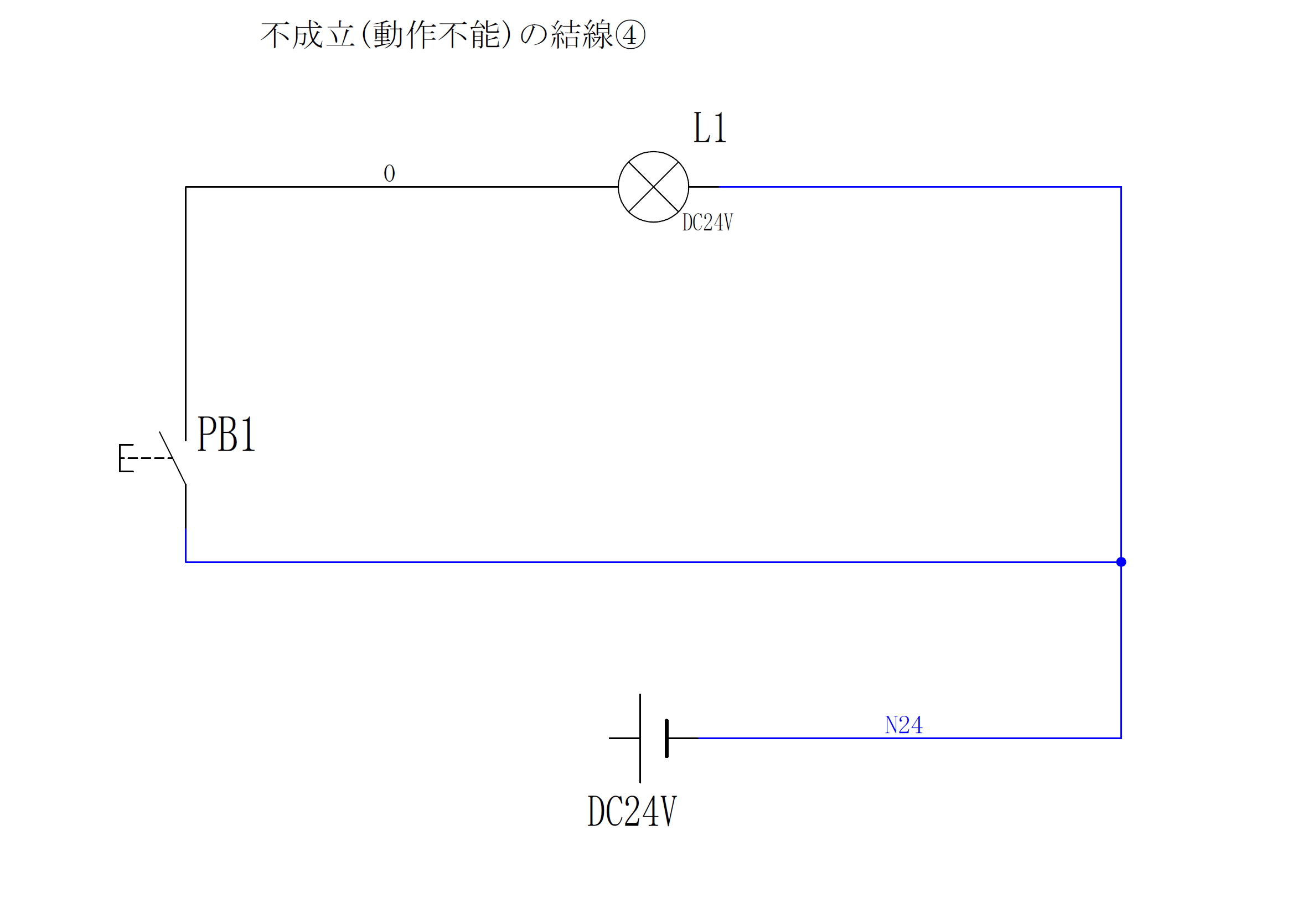
電気回路は「回路」であり、さらに英語でも「circuit」というくらいですので必ずくるっと一周しています。つまり電源の極の片方から出た線は必ずもう片方に戻ってくるということです。
下の図のように途中で途切れていたりスタートに戻ったりなどは決してありません。
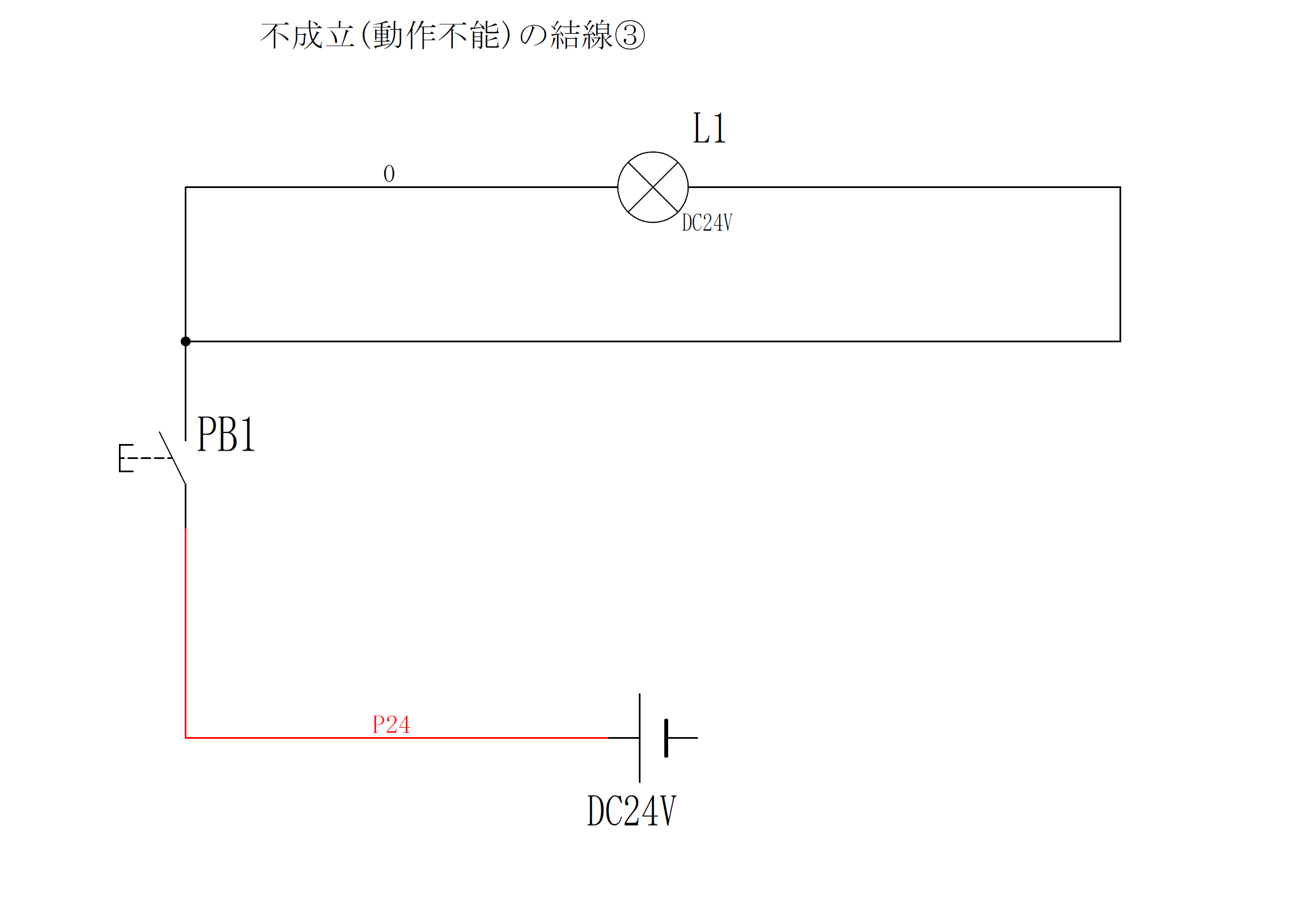
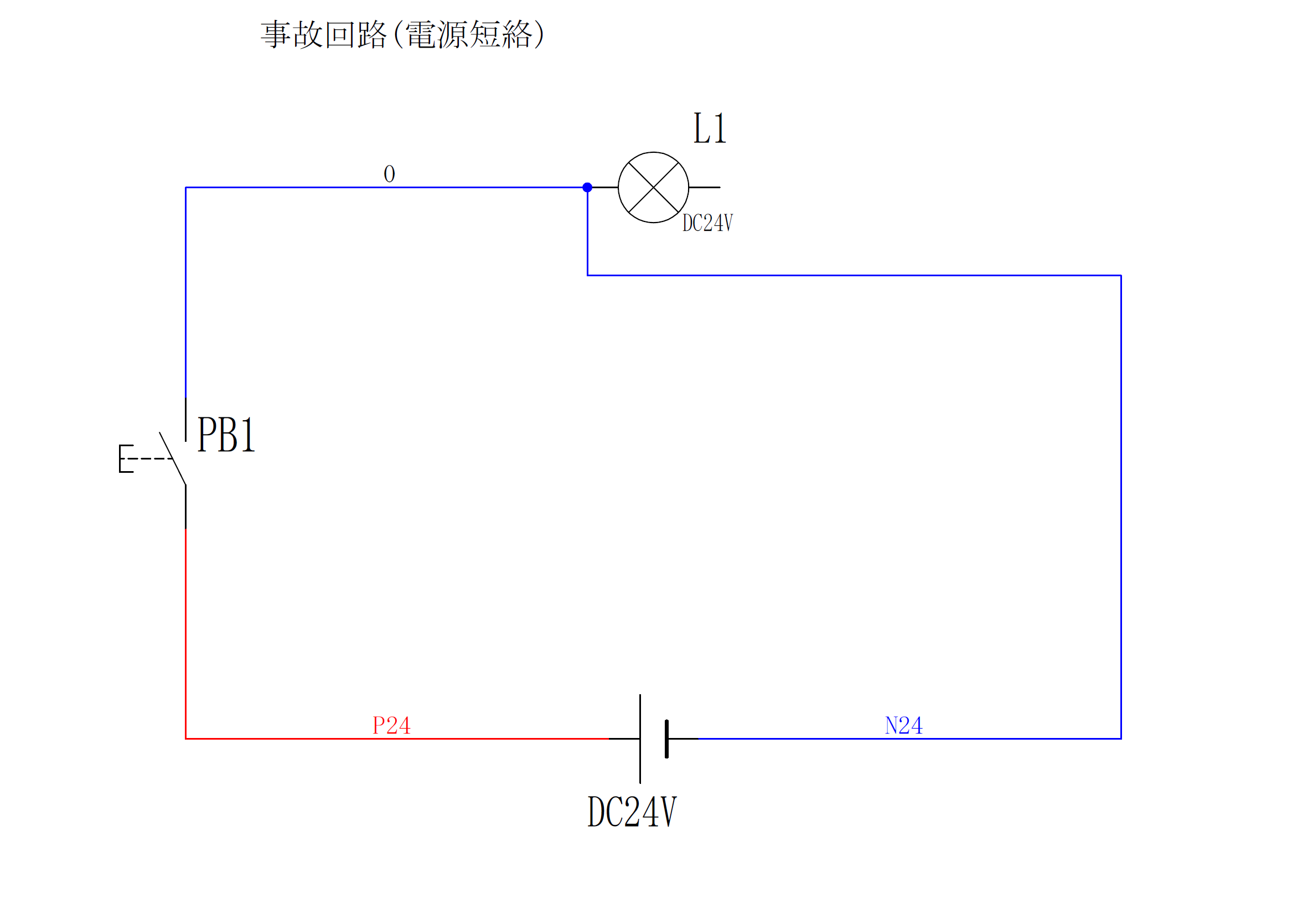
更にいうと、電気回路では負荷となる機器を介さずにスタートからゴールつまり片方の極からもう片方へ配線だけで一周するような配線接続は厳禁です。それは短絡といい電気の事故を起こす結線となります。以下の回路ではスイッチを投入した瞬間に短絡電流が生じる危険な回路になっています。
まずは上記のような電気回路におけるルールが大前提となります。
2.自己保持回路を読む
ここでは制御回路の基本形である「自己保持回路」について簡単に動作メカニズムと条件の読み解きをします。これがきっちり落とし込めたらこの先の回路の読解に必ず役立ちますので、多めに時間をかけてでも理解していきましょう。
1)制御回路の解読は条件探し
電気回路における大前提をしっかりおさえたうえで、自己保持回路での説明をしていきます。あくまでも制御回路の動きに着眼した説明ですので、受変電や計測における電気計算の話は割愛し、制御のロジックを追いかけることに専念します。
回路読解のコツのようなものに関して結論から言いうと、制御回路では条件探しが主となります。回路の目的、つまりは「どの負荷を動作させたいのか」などを念頭においてその条件をひとつずつピックアップする作業が回路図を読むことにそのままつながります。
以下に自己保持によるランプ点灯回路の図を載せます。電源は産業用設備でよく目にするDC24[V]を例に挙げます。
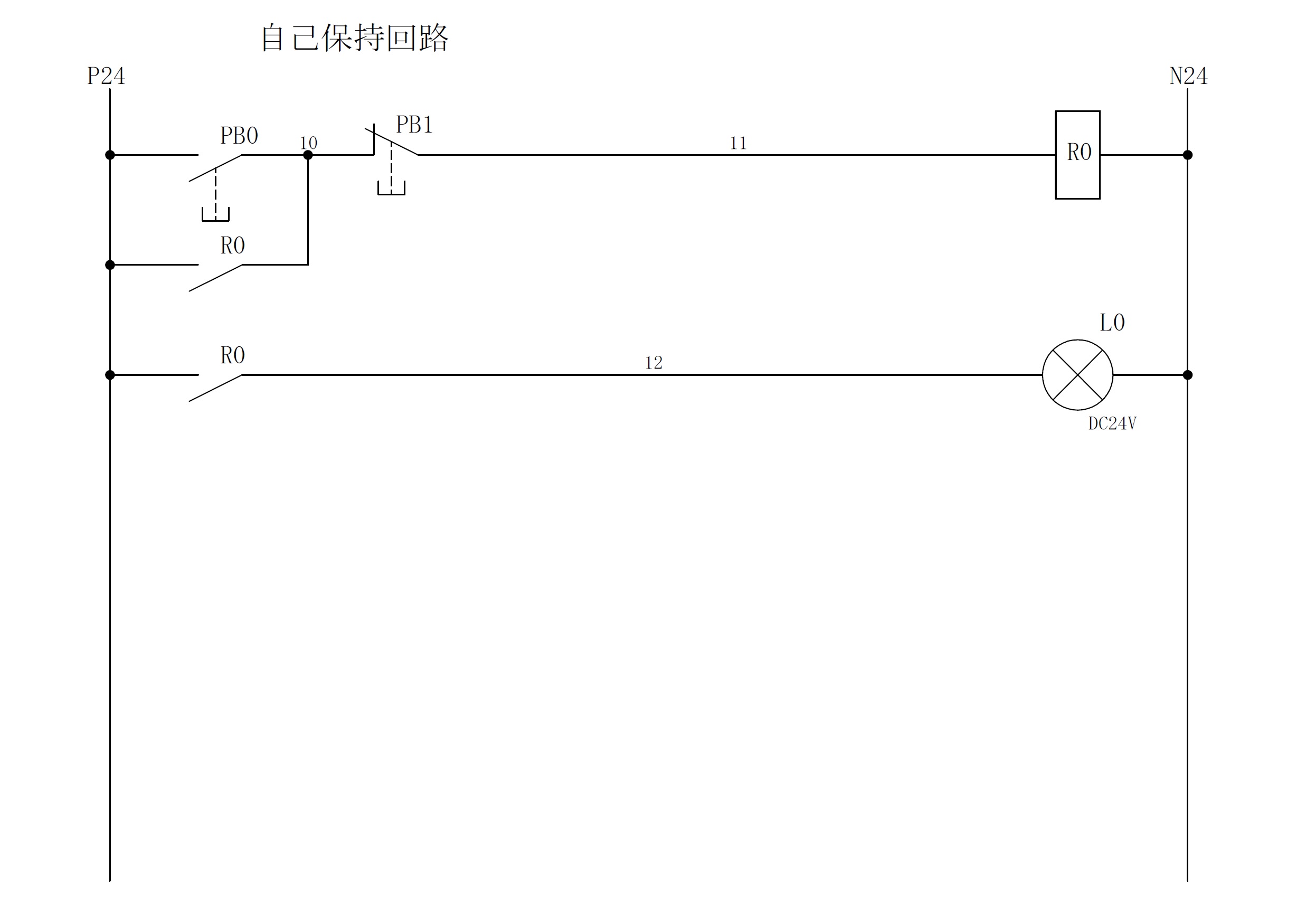
上記自己保持回路はランプ「L0」を点灯消灯させることを目的としています。ではどのようなロジックで点灯するのでしょうか。簡単に説明します。自己保持回路でのリレーの機構を含む動作メカニズムに関する詳細な説明はシーケンス制御の基礎〜自己保持回路〜の記事にありますので、まだ自己保持回路についての理解がなされていない場合はそちらから入ることをお勧めします。
では例に挙げた自己保持回路における動作メカニズムを追いかけます。
①スイッチ「PB0」が押される。
②リレー「R0」のコイルが励磁される。
③「R0」の全ての接点が反転する。
④反転した「R0」のa接点に接続された回路が閉路する。
⑤「PB0」の押下をやめる。しかし「R0」の接点により、「R0」自身のコイルへの励磁は継続される。
⑥同時に別のa接点に接続された「L0」の回路がつながることとなりランプが点灯する。
⑦「PB1」スイッチが押されると「R0」リレーの保持が断たれ、リレーの接点は復帰し、ランプが消灯する。
上記が自己保持回路によるランプの点灯消灯動作です。このような比較的単純な回路ではその動作順序を一気に読み解くことが可能です。では「L0」を点灯させるために、この中にどのような条件が隠れているのでしょうか。以下にまとめます。
a)「L0」の点灯には「R0」のa接点が導通しなければならない。
b)「R0」のa接点閉路のためには「R0」コイルが励磁されなければならない。
c)「R0」のコイル励磁には「PB0」による回路の接続が必要。
d)「R0」のコイル励磁の継続には「R0」自身のa接点動作が必要。
以上が「L0」点灯のための条件となります。こんなに単純な回路なのにも関わらず意外と多い条件が隠れていますね。
2)逆から読む
「1)」に記載の内容からピンときた人もおられるかもしれませんが、実は回路を読む際には負荷側(下流)からみていくと、何をもってして機器が動作するのかがよくわかります。以下は電動機の駆動回路です。電動機「M0」を駆動させるためには回路上のどのような工程をたどるのでしょうか。
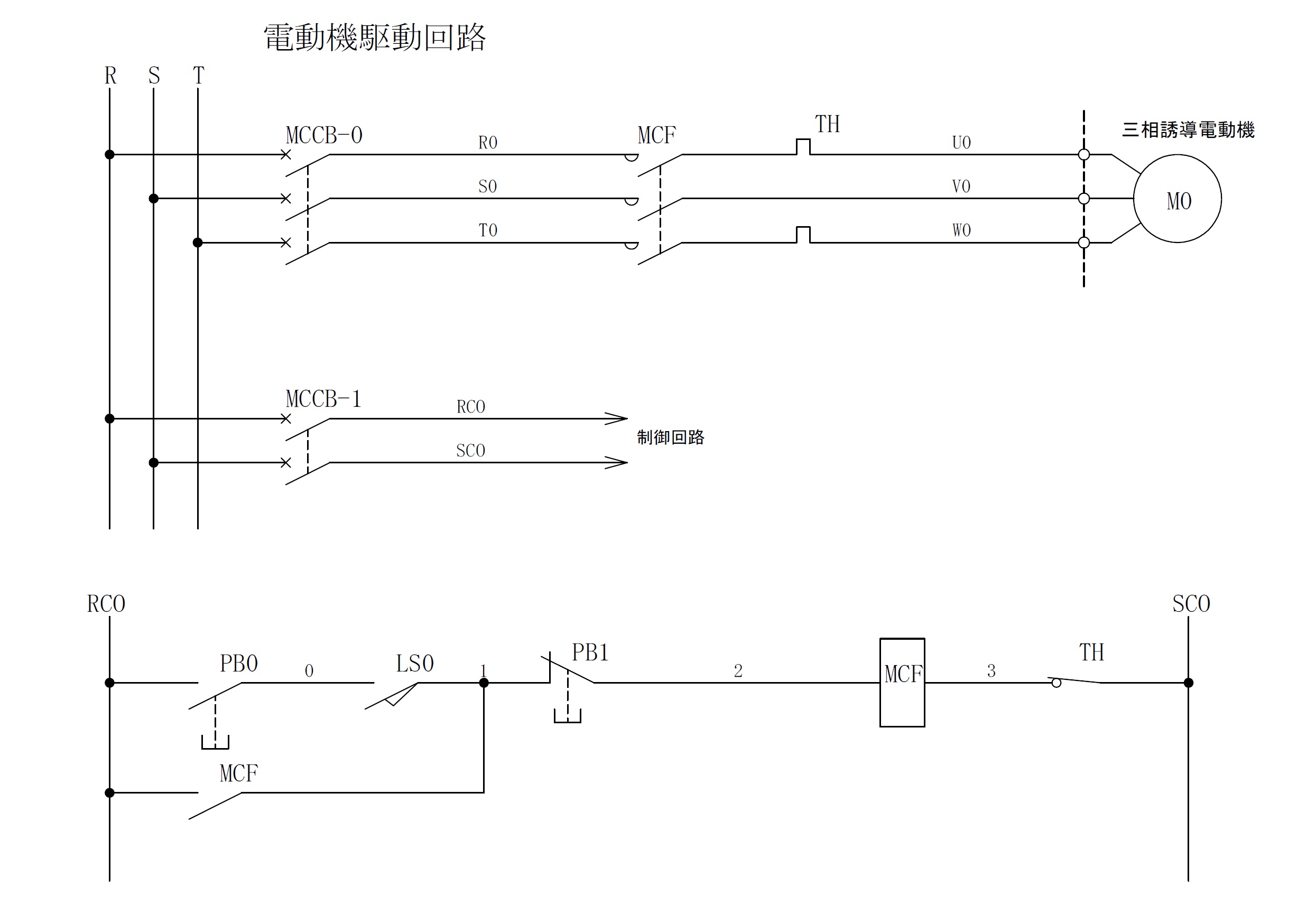
主回路の負荷側と制御回路の下流から読みます。
①電動機「M0」の駆動には電磁接触器「MCF」の接点導通が必要(「MCCB-0」が投入されている前提)。
②「MCF」の接点導通のためには「MCF」のコイルが励磁されなければならない。
③「MCF」コイルの励磁開始には、a)サーマルリレー「TH」がはたらいておらず,b)押ボタンスイッチ「PB1」が導通のままで,c)リミットスイッチ「LS0」が導通しており,d)押ボタンスイッチ「PB0」が導通する,という四つの条件が成立しなければならない。
④「PB0」の接点復帰(開路)後でも「MCF」コイルの励磁継続のためにはa)押ボタンスイッチ「PB1」が導通のままで「MCF」a接点が導通している必要がある(「MCF」コイル励磁にて必然的に同a接点は導通)。
言葉に書き起こすと、少しややこしいですが上記をひとつずつ追いかけると「M0」が駆動するための条件がみえてきます。つまり回路図が読めるということになります。補足ですが、主幹の「R」「S」「T」から分岐した「MCCB-1」遮断器の二次側に接続された配線「RC0」「SC0」は図の下半分に記載する「RC0」「SC0」につながっています。配線番号が同じであるということは「つながっている」という判断になります。
3)接点とコイル(負荷)から
複線図で表現されている主回路などは比較的単純で見やすく、図面を読み解くのにあまり苦労はしないのではないかと考えます。もちろんですがいくら主回路とはいえ多くの計器などが付随してくると読解の難易度は上がります。
とはいえ、筆者含め皆さんが苦労するのは制御回路になるのではないかと考えます。シーケンスラダーを含む展開接続図は、主回路に比べ一般的に多くの機器とその結線が記載されていますので見ただけでうんざりすることもあります。
そこで、常に念頭においておけば比較的整理しやすい方法として「コイル」を中心にその励磁に関わる条件となる「接点」を探すというものがあります。
「このコイルを励磁させるためにはどの接点が導通すべきか」や「このコイルを励磁させるためには何が動作しなければならなくて何が動作してはならないのか」などを探すことが近道のひとつとなりうるはずです。これは筆者の経験からもきています。
接点は非常に単純な動作なので、回路における意味合いも理解しやすいのではないでしょうか。そしてその後、動作の不明な機器がある場合にこれらの動作を調査し解読していけば、よりスムーズに回路全体を読んでいけるのではないでしょうか。
3.計器が付加される場合
ここまでは回路の読解におけるコイルと接点のみの基本的な説明をしてきました。ですが、制御における機器は様々です。特に図内に登場することでアレルギー反応を起こしそうになるのは制御器類です。調節計などに代表される、測定や調整または制御を担う機器であり、接点やコイルとは一線を画す少し複雑な部品です。
これらはそれのみですでに複雑で高度な回路を内蔵しており、制御器類が要求する範囲の入力であれば自動的に内部で演算処理を実行し、その入力に応じた出力をしてくれる機器です。なんとも複雑で扱いにくそうなものですが制御器各々のルール(取り扱い)を知ってしまえばとても便利な部品です。また、産業用機器の制御盤などにおける制御器の代表格はPLCやDCSなどでしょうが、ここでは制御器として比較的わかりやすい調節計を例に挙げて説明します。
制御器が展開接続図に登場してきたときに「ダメだ・・・」とならないように簡単な動作だけでもおさえておきましょう。
1)制御器を含む回路例
早速ですが以下は調節計を含む回路の例です。熱電対を入力のセンサとして使用する調節計が接続されています。このような回路はいったいどのように解釈するべきなのでしょうか。
イメージしやすいように、この回路で制御する設備の仕様を、簡単ですが次のように仮定します。
①温度の自然降下に対して一定値(例えば100[℃])を保つように制御する。
②場合に応じて手動での温度制御の操作(加温操作)ができるようにする。
③熱媒には蒸気や温水または油などの流体を使用する。
上記の仕様を仮定として以下の図をみていきましょう。


まず注目すべきはやはり主幹の二線に接続された電磁弁の回路です。「ソレノイドバルブ操作回路」と銘打っていますので、その目的はもちろんこの電磁弁(ソレノイドバルブ)の開閉動作制御になります。
「ソレノイドバルブ操作回路①」に記載されているのは「MCCB-0」の遮断器が投入されている状態で「MCSV」の接点が閉路することで「SV0」電磁弁が動作するというものです。

次に「MCCB-1」の遮断器にて電源供給される制御回路に移ります。先ほどピックアップした「MCSV」を励磁させるための回路はどこでしょうか。「ソレノイドバルブ操作回路②」の一番最後に記載があります。ここには「R0」のa接点が記載されていますので、これのコイルが励磁されれば「MCSV」のコイルを励磁させることができそうです。

つづいてたった今出てきた「R0」コイルの励磁に関しての読解です。このコイルを励磁させるには二つの手段が設けられていることが回路からわかります。ひとまずこの回路の下部から読むと、線番「13」の配線は押ボタンスイッチ「PB1」のb接点からきています。その前をみてみると線番「15」の配線が「RMA」a接点とつながっています。さらに前をみると、線番「14」の配線で押ボタンスイッチ「PB0」a接点とつながっており、このスイッチは電源の片相となる「RC0」とつながっています。

現時点でわかるのは「PB1」が押されていない状態で、かつ「RMA」a接点が投入されているときに「PB0」が押されると「R0」を励磁させることができるということです。ですが、この回路内でまだ不明な点が二つあります。「RMA」は何によって投入されるのかということと、線番「14」の配線で分岐している「R0」a接点が何のためにあるのかです。

この二点についてまずすぐに解決できるのは「R0」a接点についてです。これはこの押ボタンスイッチで「R0」を励磁させる場合の、毎度おなじみ自己保持接点となります。これがなければ「PB0」から指を離した時点で「R0」の励磁は解かれてしまいます。このことは記事の上に説明をしていることとなります。
では二つ目の「RMA」は何によって投入されるのでしょうか。こちらに関しても理解は非常に容易です。接点に「RMA」とありますのでこれを投入するためのコイルを探します。「ソレノイドバルブ操作回路②」の最上段にこれが記載されています。このコイルが励磁されるには線番「10」の配線で接続されている切り替えスイッチ「COS0」を操作することとなります。コメントにあるとおりこのコイルは手動による加温操作を有効にするための継電器となります。

つまり「COS0」手動側a接点が導通することにより「RMA」コイルが励磁され、「PB0」と「PB1」による加温のためのバルブ開閉を任意で操作できるようになる回路であるということがわかります。

次に、もう一つの手段による温調の方法を説明します。
「R0」のコイルに接続されている線番「13」の配線でなにやら途切れたような回路がありますが、これに関しては後述します。さらにその前をみると「RAU」という接点があります。これを導通させるための操作に関しては、先ほどの切り替えスイッチの回路から明らかになります。「COS0」による切り替え操作で励磁させることのできる継電器コイルに「RAU」があることから、この接点の導通は「COS0」の操作で可能となります。


では先ほど見送った、途中で切れているように見える回路について説明します。
ここはよく見ると矢印表記となっています。また外部端子や境界表記もないことからこの回路を収めている盤内に接続先があると判断できます。そしてそれが温度調節計の出力端子であることが「ソレノイドバルブ操作回路①」の図からわかります。この図にも矢印で引き出された線番「13」の配線が存在します。コメントで「温度調節計」と書かれた回路です。一見切れているような「13」は実はここに繋がっているということをあらわしているのです。


同様に「ソレノイドバルブ操作回路②」の線番「12」の配線についても温度調節計の出力端子から引き出されていることがわかります。
これらについてまとめると、「COS0」で「RAU」側が励磁されている場合、温度調節計の接点出力によりその設定に応じて自動的に加温操作が実行されるということになります。
2)制御器端子の意味
温度調節計などの制御器には多くの配線が接続されることがしばしばあります。電源端子やセンサ入力端子,出力端子などはよくある接続箇所です。
上記の回路でいえば、実際の温度を計測するためのセンサ(熱電対)が端子「c」「d」に接続されており、出力端子の「e」「f」には制御回路の配線である「12」「13」が接続されています。ここには接点動作による制御出力であることが記載されています。さらに温度調節計への電源も配線されています。各々の端子は各々に意味がありますので誤配線の無いように注意が必要です。例えばセンサの入力端子に電源を接続し、電圧を印加してしまうとほぼ確実に制御器は破損することとなります。繰り返しますが、各端子のもつ役割をよく理解したうえで配線すべきです。
4.事後保全,改良保全
図面を読む力があるということにより、まずこなしていくことができそうなこととして「修理」があります。もっと業務的な表現をするなら「事後保全」といいます。ある日突然、制御上の不具合が発生し対応をせまられる場合、必ずといっていいほど図面を確認することとなるでしょう。
不具合箇所の正規の動作に対して現状がどのような動きになっているのか、差異を知るためには図面を読む必要があります。
また、設備や機械の「改造」にも図の読解が必要です。業務的にいうと「改良保全」です。
改良保全では事後保全のときよりも広く図面を読み解かなければならないことがしばしばあります。更に改良するにあたっては、もちろんその改良の規模にもよりますが、例えば10回路分ほどのごく小規模な設計を求められることも多くあります。
以降に事後保全対応の例題と改良保全の例題をひとつずつあげます。
一度、「自分ならこのように対応する」ということを想像しながら読み進めてみてください。
1)例題1/修理
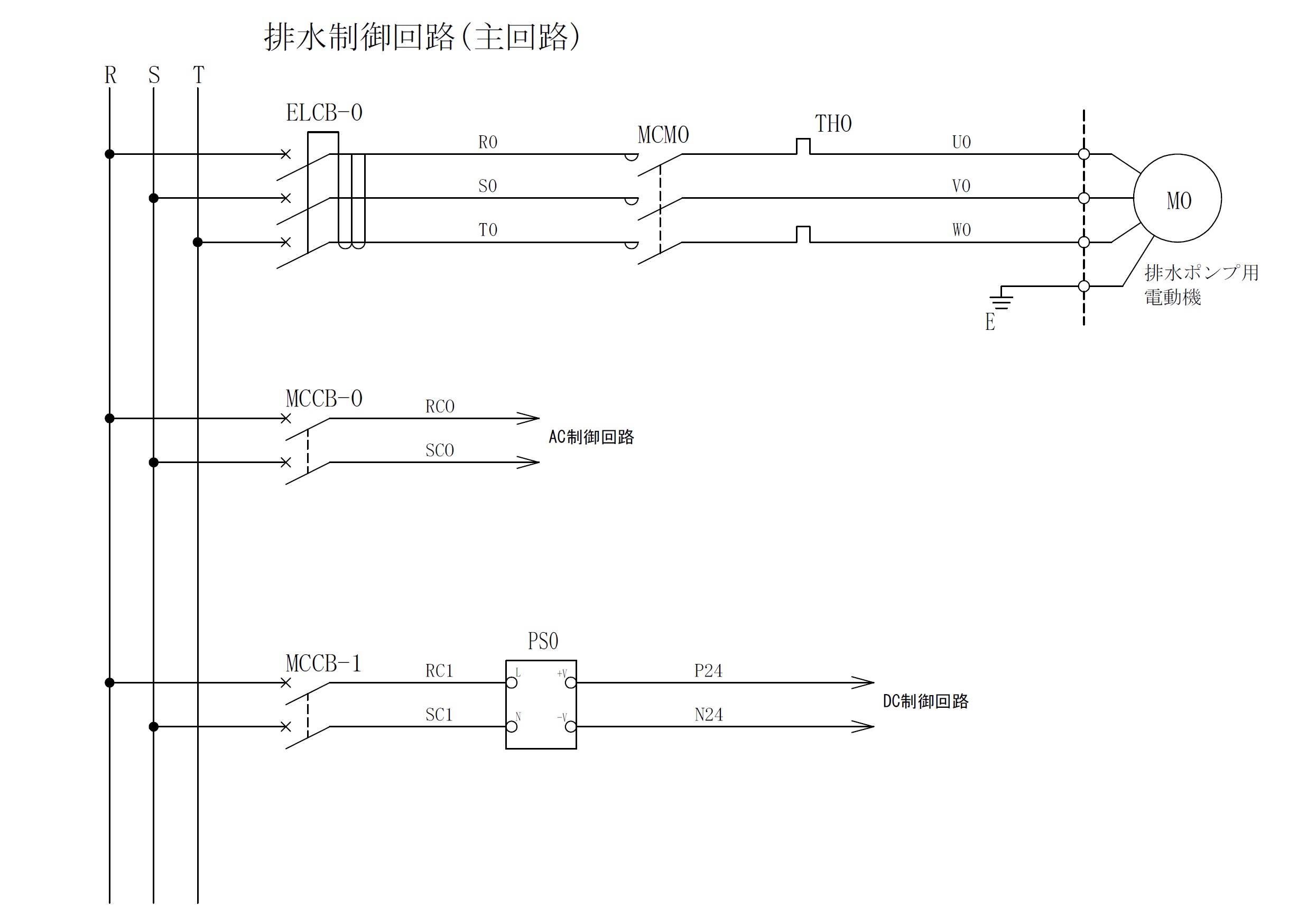
以下回路にてポンプが動作しないという不具合が発生の場合、考えられる要因を可能な限りピックアップしてみてください。以下に仕様と症状を記載のうえ、図面を提示します。なお、下の図に出てくる「ELCB」は漏電遮断器という漏電検知による遮断機能をもつ遮断器となります。
設備の仕様
①液面が自然上昇するピット(または容器)の排水をする設備とする。
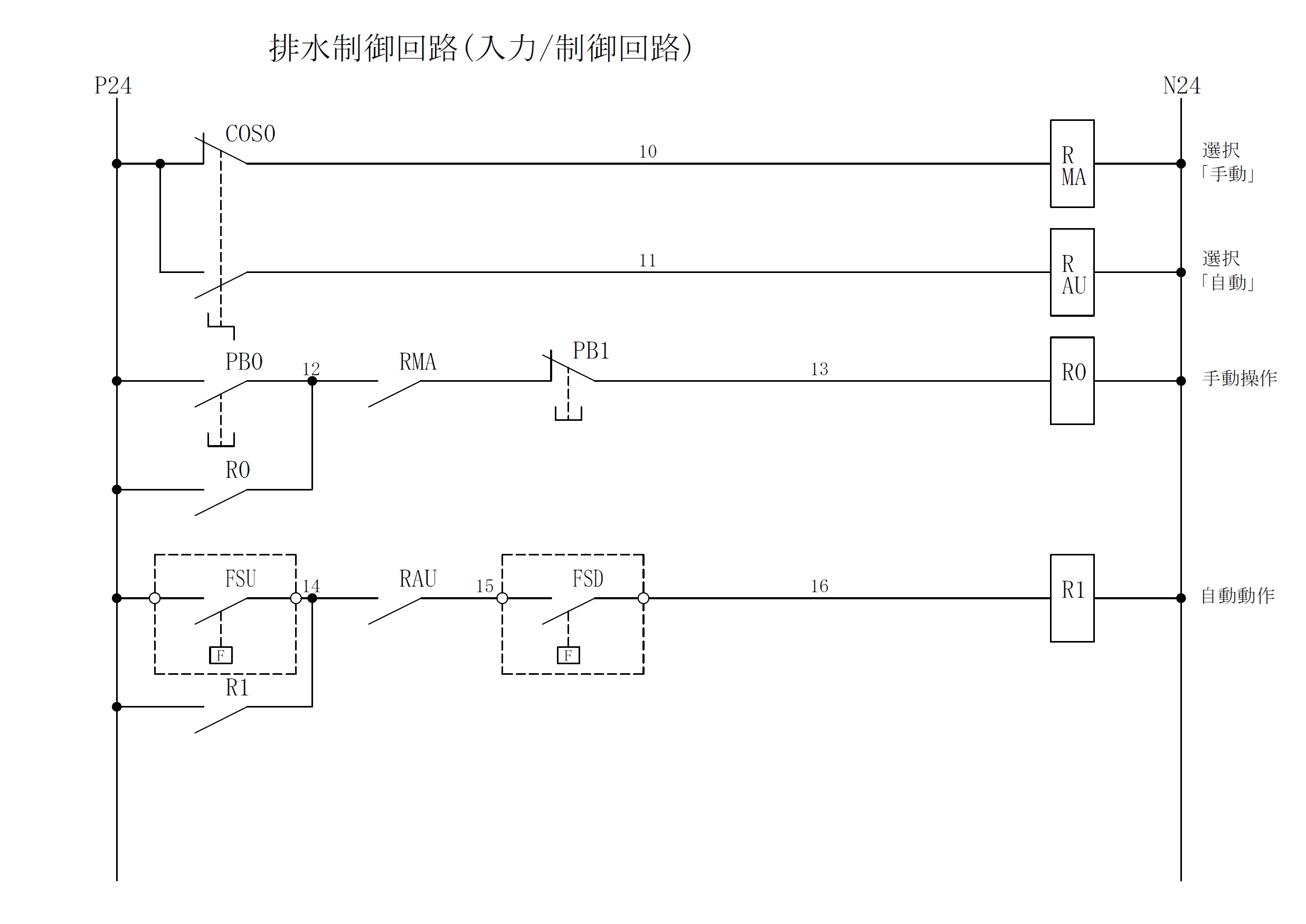
②自手動の切り替えスイッチ「COS0」で「手動」を選択の場合、ポンプの起動停止を「PB0」と「PB1」で任意操作可能とする。
③「自動」を選択の場合、フロートスイッチという水位検出スイッチの3[sec]以上の導通でポンプを起動する。起動用フロートスイッチではフロートの浮力による浮き上がりで導通となる。このときに使用するフロートスイッチを「フロートスイッチU(FSU)」とする。
④「自動」を選択の状態でさらに起動用フロートスイッチにより起動中の場合、下部に位置するもうひとつのフロートスイッチの動作によりポンプを停止させる。浮き上がり導通とする。当フロートスイッチを「フロートスイッチD(FSD)」とする。
症状(故障の状態)
①起動スイッチよる起動に反応しない。
②フロートスイッチによる水位上昇を検知したであろう水位でも自動起動をしない。
③押しボタンスイッチやフロートスイッチは交換済み。故障の状態に変化なし。
回路図
2)解答例1/修理
上記の解答例を以下に記載します。
解答例①
遮断器(ブレーカ)のいずれかまたはいくつかが投入されていない。
図面からわかるとおり、上記の排水制御回路は「ELCB-0」「MCCB-0」「MCCB-1」のいずれかひとつでも投入されてなければ、通常操作や通常制御での一切の動作はしません。
解答例②
「PS0」の故障
「PS0」は通称パワーサプライという直流電源供給機器です。これが正常に動作していなければ、直流系統の制御回路が一切動作しないので、結果的には各種スイッチによるポンプの起動ができません。
解答例③
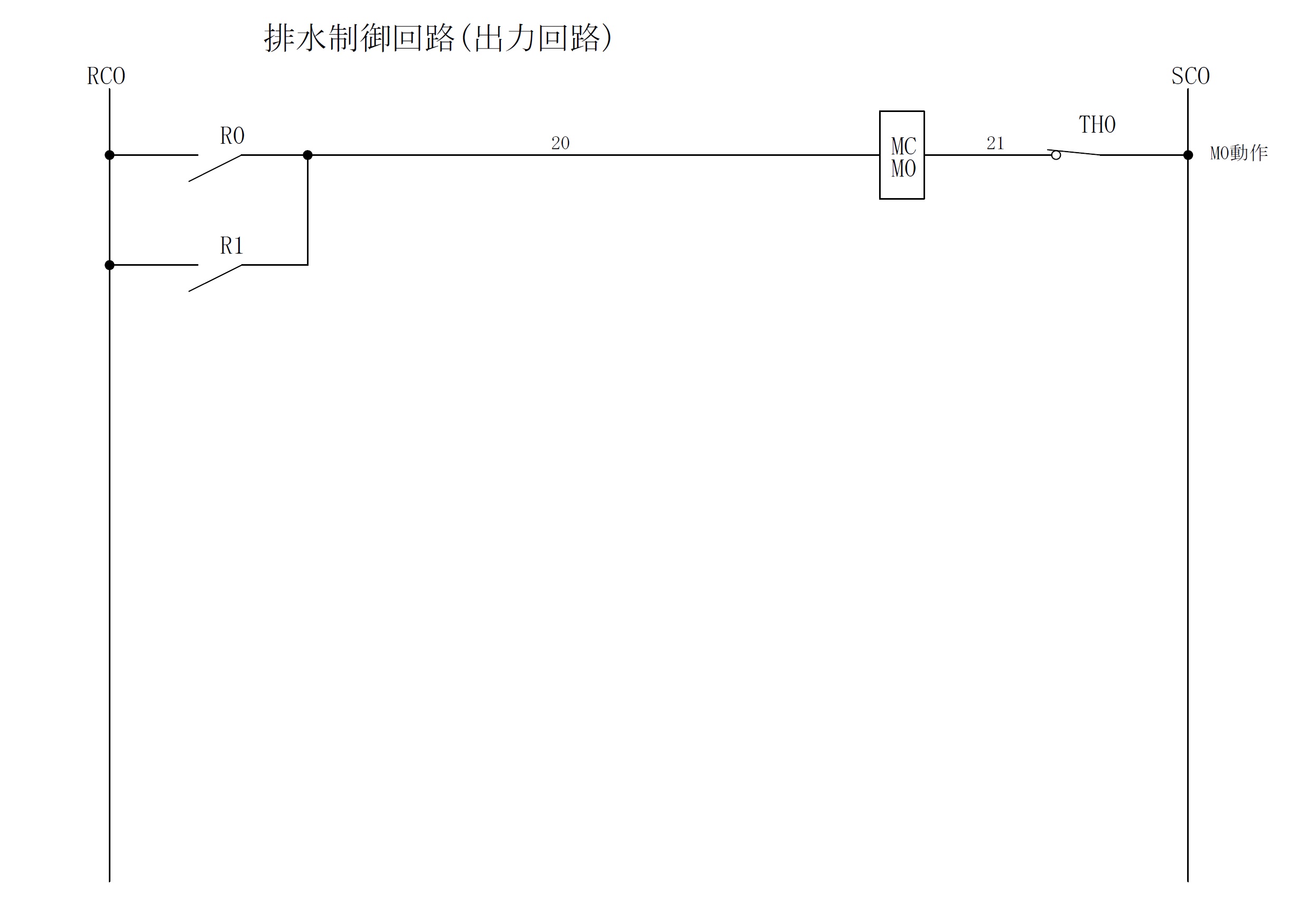
「MSM0」コイルの異常
「MSM0」に適正な電圧が印加されているにもかかわらず、接点が動作しないということはこのコイルの励磁に異常があると考えられます。
解答例④
「MSM0」コイルの回路に断線がある
配線番号「20」の配線が断線している場合は例題のような症状になります。「解答例③」はコイル自体に異常がある場合ですがこちらはコイルへの電力供給状態に異常があるということになります。
3)例題2/改造
シャトル動作(往復動作)をするコンベアを対象として、自動往復動作へ改造をするという内容です。改造前設備の簡単な仕様を以下にまとめます。
改造前の動作(仕様)
①押しボタンスイッチ「PBF0」でワーク前進方向へコンベア駆動。
②押しボタンスイッチ「PBR0」でワーク後退方向へコンベア駆動。
③前進でも後退でもワーク移動先の定位置にあるリミットスイッチ「LSF0」「LSR0」で停止する。
④前進した先ではロボットアームなどの別ユニットにて搬送ワークの取り出しやラベル貼り付けなどの作業が行われるものと仮定し、その作業の完了を見計らって後退の押しボタンスイッチ「PBR0」により原点へ戻ってくる。
⑤利用している継電器はオムロン製「MY4N」とする。
改造要求内容
改造の内容として以下に記載します。
①「自動」動作と「手動」操作の切り替えスイッチ「COF0」を設ける。
②「手動」による動作の場合は改造前と同様。
③「自動」による動作の場合、起動用押しボタンスイッチ「F-SW」で起動する。
④自動起動時、コンベアによるワーク搬送部はまず前進動作を開始する。前進端に到達後はタイマーでの設定時間経過まで待機する。設定時間経過後は自動的に後退動作を開始し、後退端リミットスイッチで停止する。
⑤利用するタイマーはオムロン製の「H3YN」シリーズを想定とし、ONディレイ動作を利用する。設定時間は60[sec]とする。
以降、改造前の回路について記載と説明をします。
先ずは主回路です。以下の主回路では「MSF0」と「MSR0」で電動機に対して三相の各相を入れ替えることができるように配線されています。「MSF0」により「R0」と「L1」,「S0」と「L2」,「T0」と「L3」という接続を正相入力とする場合、「MSR0」では「R0」と「L3」,「S0」と「L2」,「T0」と「L1」の組み合わせになるように接続されます。
また、幹線からは「R」,「S」の各相から制御用の電源も取り出しています。

以下は各スイッチによる動作指令入力の回路です。このあと出てくる制御回路に直接組み込んでもよいのですが、図のわかりやすさや汎用性(改造対応のしやすさ)を考慮し図のような形にしています。
「F-SW」が押されると「RF0」が励磁され、「R-SW」が押されると「RR0」が励磁され「STOP-SW」が押されると「RSTP」が励磁されます。

下の図は制御回路及び出力回路となっています。コンベアの前進のためには「MSF0」が励磁される必要があります。それには「MSR0」「LSF0」「RSTP」のコイルが励磁されておらず(各々b接点が導通のまま)、入力回路の「F-SW」による「RF0」の接点導通が必要となります。後退のためには「MSR0」が励磁されている必要があり、そのために「MSF0」「LSR0」「RSTP」のコイルが励磁されておらず(各々b接点が導通のまま)、入力回路の「R-SW」による「RR0」の接点導通が必要となります。

以上の回路にて、任意のスイッチ操作によるコンベアの前進後退を操作することが可能となります。
4)解答例2/改造
要求のとおりの改造が以降の図となります。
いきなりこのような作図ができなくても、解答例の回路をまず読めるようになったうえで改造前とどのような変更がなされているのかが理解できるということが第一です。
主回路については変更の必要がありません。理由としては「MSF0」や「MSR0」は電動機にはたらきかけるのみとなっており、この「MSF0」「MSR0」の制御変更が今回の改造目的になるからです。
以降からは、まとめて下に記載した回路図を抜粋しながら説明をしていきます。





上にまとめて記載した図を抜粋しながら順番に説明します。
まず「操作回路」すなわち入力回路では接点が追加される必要があります。まず、切り替えスイッチ「COS0」とその補助継電器です。また、前進端や後退端のリミットスイッチの信号も補助継電器で受ける必要が出てきます。これは、これらの信号を複数箇所で利用することに起因します。さらに、ストップ動作のための補助継電器の数もひとつ増やしています。利用する接点数が増えることが理由となります。


「手動操作制御回路」では手動操作選択の「RMA,a接点」が追加になったことと、リミットスイッチの接点が「RLSF0」や「RLSR0」へ置き換わったこと以外は改造前と同様です。
では制御回路を抜粋して読んでいきます。ここからが今回の改造の醍醐味です。先に述べたとおり負荷により近いコイルを焦点に読んでいきます。
負荷は主回路にある「搬送コンベア用電動機」です。その前進方向駆動用の開閉器(接触器)接点は「出力回路」に記載されている「MSF0」です。「MSF0,コイル」は「RMAF0」と「RAUF0」のいずれかのa接点が導通することで励磁されます。「RMAF0」は「手動動作制御回路」ですでに出ており、自動動作には直接関係ありませんので考慮から省きます。

では、もうひとつの接点である「RAUF0」についてみていきます。これがコンベア動作の自動往復制御の前進動作に関与します。このa接点を導通させるコイルは「自動動作制御回路」にあります。当図の最上段です。このコイルを励磁させるための条件は「RLSF0,b接点」が反転しておらず(導通のまま)、「RSTP,b接点」も反転していない状態で「RAU,a接点」が導通しており、さらに「RF0,a接点」が導通であることの四つです。
これら接点は「RLSF0」が「前進端リミットスイッチ」,「RSTP」が「停止操作スイッチ」,「RAU」が「自動選択」,「RF0」が「前進操作または自動起動」となっています。
つまり、コンベアのワーク搬送部が行先の前進端リミットスイッチに触れておらず、停止操作もされておらず、自動選択されている状態で自動起動スイッチ指令が出ることで搬送コンベアは前進方向へ駆動することとなります。

次に、後退についてみていきます。後退方向駆動用の開閉器(接触器)接点は「出力回路」に記載されている「MSR0」です。「MSR0,コイル」は「RMAR0」と「RAUR0」のいずれかのa接点が導通することで励磁されます。先ほど同様「RMAR0」は「手動動作制御回路」ですでに出ており、自動動作には直接関係ありませんので考慮から省きます。

このコイルも「自動動作制御回路」にあります。当図の最下段です。このコイルを励磁させるための条件は「RLSR0,b接点」が反転しておらず(導通のまま)、「RSTP,b接点」も反転していない状態で「RAU,a接点」が導通しており、さらに「T0,a接点」が導通であることの四つとなります。ここに「RAUR0」の自己保持のためのa接点が「T0,a接点」と並列(OR)に接続されます。
これら接点は「RLSR0」が「後退端リミットスイッチ」,「RSTP」が「停止操作スイッチ」,「RAU」が「自動選択」,「T0」がタイマーとなります。
つまり、コンベアのワーク搬送部が戻先の後退端リミットスイッチに触れておらず、停止操作もされておらず、自動選択されている状態でタイマー指令が出ることで後退動作を開始することとなります。

ここで「RAUF0」のときとは異なる「T0,a接点」なるものが登場しました。これは「T」のシンボルで表されたタイマーの接点です。ではこのタイマーのa接点はどのようにして導通させられるのでしょうか。その答えがすぐ上段に記されています。「T0,コイル」の記載があります。これの励磁条件は「RLSR0,a接点」が導通しており、「RAU,a接点」も導通で、さらに「RAUH0」も導通状態であることとなります。

またもや新たに接点が登場しました「RAUH0」です。そのまま続けてみていきます。「RAUH0」のコイルは「T0」の回路のすぐ上にあります。励磁条件は「RAUF0」「RSTP」「RLSR0」で「RAUH0」は「RAUF0」と並列(OR)に接続され、自己保持用の接点としてはたらきます。この回路の目的としてはコンベアのワーク搬送部がいかなる位置にいても、自動起動スイッチ「F-SW」で自動動作を開始することにあります。

もしこの「RAUH0」接点と回路が無ければコンベアはどのような動きになるのでしょうか。結果としては非常に危ない状況をはらんだ制御となります。以下の特定の状況下で「F-SW」操作無しで勝手に動き出すこととなります。
①コンベアのワーク搬送部が前進端にある。
②切り替えスイッチが「手動」から「自動」へ切り替えられる。
上記の瞬間にタイマーが作動し、設定時間経過後に勝手に動き出すこととなります。これを防止し、必ず前進動作から始めるために「RAUH0」の回路を挿入しています。
5.必ず読めます
ここまで電気回路図、特に複線図や展開接続図の解読のしかたについて説明してきました。まずは言語(人間語)における単語に相当する「シンボル」の理解と記憶が必要であること、次に「コイル」と「接点」を追いかけるということ、そして動作不明な機器について調べることが大まかな手順として効率的ではないかという提案を含めた解説です。
ほぼ独学の筆者でも上記の方法を利用して、実務の上で図を読むことが可能となっています。もちろん不明な機器についてはものによっては時間がかかることもあります。ですがその時点ではすでにわからないことが何なのか明確になっているので必ず答えにたどりつくことができます。
ですので、電気回路図のような一見難しそうな図面でも必ず読み解くことは可能です。皆さんも是非いろいろな図面に触れて、より一層のスキルアップを目指してください。応援しています。